Nuclear¶
This module is a re-implementation of the IAEA NMQC toolkit that was written for ImageJ [1], [2]. The toolkit itself appears to be based on the IAEA No. 6 QA for SPECT systems publication [3].
The module is designed as a near drop-in replacement for the ImageJ plugin. The algorithms have been duplicated as closely as possible.
Note
This is not designed to compete or replace the ImageJ plugin. It was designed for RadMachine customers, where Python is available. This should be considered an alternative for those who prefer Python over ImageJ.
In the following examples, the sample images given by the NMQC toolkit are used [4].
Max Count Rate¶
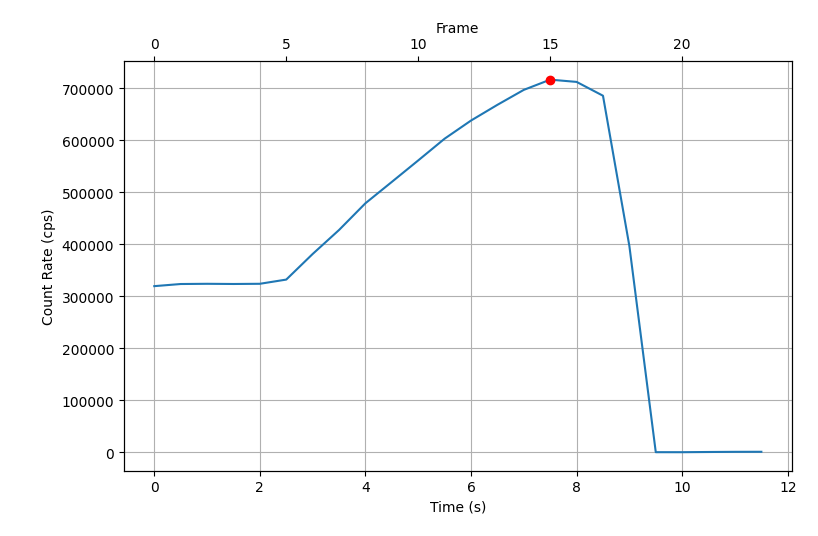
This test is based on the NMQC toolkit and IAEA test 2.3.11.4. The max count rate will examine each frame of a SPECT image and determine the maximum count rate, which is the sum of the pixel values. The maximum count rate and max frame can then be reported. A plot of the count rate vs frame number is also generated.
from pylinac.nuclear import MaxCountRate
path = r"C:\path\to\image.dcm"
mcr = MaxCountRate(path)
mcr.analyze(frame_resolution=0.5) # or whatever resolution it was acquired at
results = mcr.results_data()
print(results)
mcr.max_countrate # the maximum count rate
mcr.max_frame # the frame number of the maximum count rate
mcr.max_time # the time of the maximum count rate
# plot the count rate vs frame number
mcr.plot()
The plot will look like similar to this:
Planar Uniformity¶
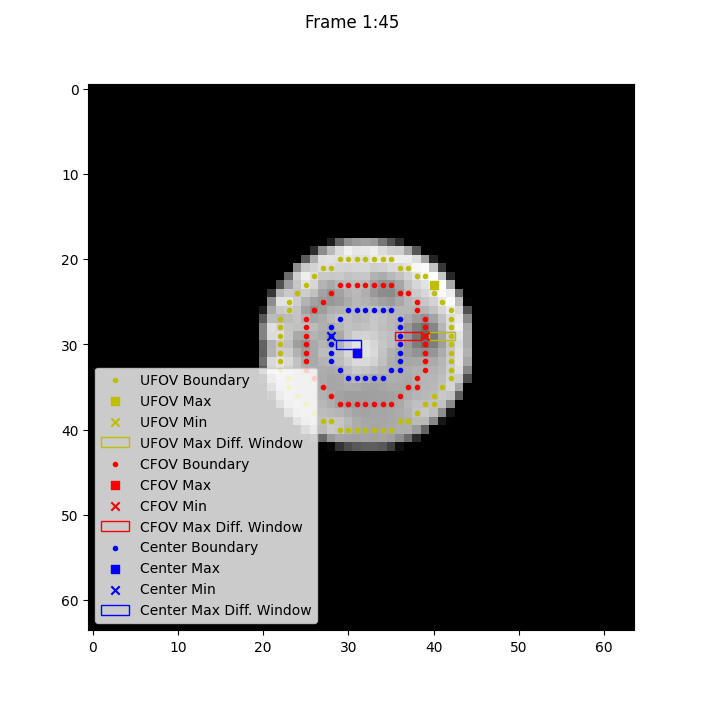
The planar uniformity test is based on test 2.3.3 of the IAEA publication. It will examine each frame of the image and analyze the usable field of view (UFOV) and center field of view (CFOV). Each frame can be plotted to show the UFOV and CFOV, the max points of each, and the sliding window that resulted in the maximum differential uniformity.
Integral Uniformity¶
The integral uniformity uses the same equation as the IAEA, which is the same as the Michelson equation but multiplied by 100. That is:
Differential Uniformity¶
The differential uniformity is the same as the IAEA, which is the same as the integral uniformity, but applied to a 5x1 subslice of pixels. The equation is the same as above.
Example Usage¶
from pylinac.nuclear import PlanarUniformity
path = r"C:\path\to\image.dcm"
pu = PlanarUniformity(path)
pu.analyze(ufov_ratio=0.95, cfov_ratio=0.75, window_size=5, threshold=0.75)
results = pu.results_data()
print(results)
pu.plot() # plot the UFOV and CFOV of each frame
This will result in an image like so:
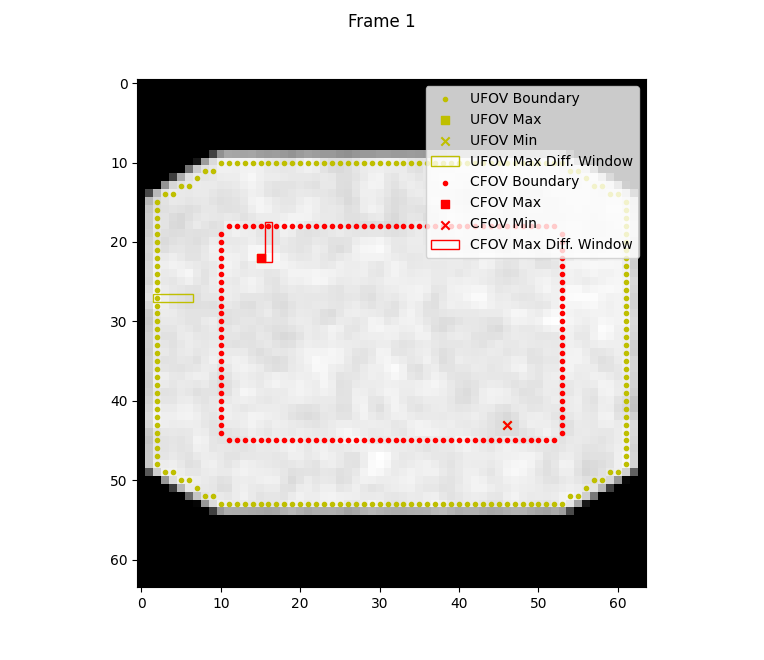
Note the UFOV and CFOV, the min and max pixel values of each FOV, and a rectangle showing the sliding window that resulted in the maximum differential uniformity.
Algorithm¶
The algorithm is largely the same as the NMQC toolkit but there are a few key differences which will be noted in the steps below.
Each step listed here is applied to each frame of the image:
The image is binned to have a pixel size > 4.48mm. I.e. if the pixel size is 1mm, the image will be binned together in a block of 4x4 pixels. The pixels are summed when binned together.
The image is smoothed using a smoothing kernel. The kernel is described on page 59 of the IAEA QC document:
\[\begin{split}\begin{bmatrix} 1 & 2 & 1 \\ 2 & 4 & 2 \\ 1 & 2 & 1 \end{bmatrix}\end{split}\]The kernel is normalized by dividing each value by the sum of all values in the kernel.
The edge pixels of the image are set to 0.
The image is thresholded. The threshold is the threshold ratio (input parameter; default of 0.75) multiplied by the mean of all non-zero pixels.
Note
This appears to be up for interpretation. The text says “set any pixels at the edge of the UFOV that contain less than 75% of the mean counts per pixel to zero”. A value of 75% of the mean could mean the entire image; the UFOV is not yet determined at this point. If so, the mean depends on the total FOV. We interpret this to mean a value of 75% of the mean of all pixels that are non-zero.
In practice, this won’t make a big difference since this only affects edge pixels.
Stray pixels are removed from the image. A stray pixel is defined as a pixel that is surrounded ony by pixels of value 0. The stray pixels are set to 0.
The UFOV is determined. The size of the total FOV is found in each dimension (x, y). The UFOV ratio is then multiplied by the total FOV size. This value is then used to “erode” the edge pixel values of the image into a smaller sub-image. E.g. if the total FOV is 22.5cm x 15cm, the UFOV will erode (1-0.95) * 22.5cm = 1.125cm (half of that from each edge).
Note
This appears to be an NMQC-specific implementation. We cannot find anything in the IAEA document that describes this step. The IAEA document only describes the UFOV as the “usable field of view”. The NMQC toolkit appears to differentiate between the total FOV and the UFOV.
The CFOV is determined. The size of the CFOV will be a ratio of the UFOV. E.g. if the UFOV is 20x20cm, the CFOV will be 0.75 * 20cm = 15cm. This difference (5cm in this case) will be “eroded” from the UFOV.
The integral uniformity is calculated for the UFOV and CFOV.
The differential uniformity is calculated for the UFOV and CFOV. The differential uniformity is calculated using a sliding window. The window size is determined by the input parameter
window_size. The window size is the number of pixels in the dimension of interest. E.g. if the window size is 5, the window will be 1x5 pixels along the x and y dimensions each. The window is slid across each dimension in 1 pixel increments. The differential uniformity is calculated for each window position. The window position that results in the maximum differential uniformity is recorded.
Note
The NMQC toolkit creates a perfect rectangle for rectangular images. Pylinac will “erode” the image equally in all directions. This will result in images where the corners take on the same shape as the total FOV. Note the clipped corners of the image above for the CFOV. In the case of pylinac, the image shape does not matter and this makes the algorithm easier.
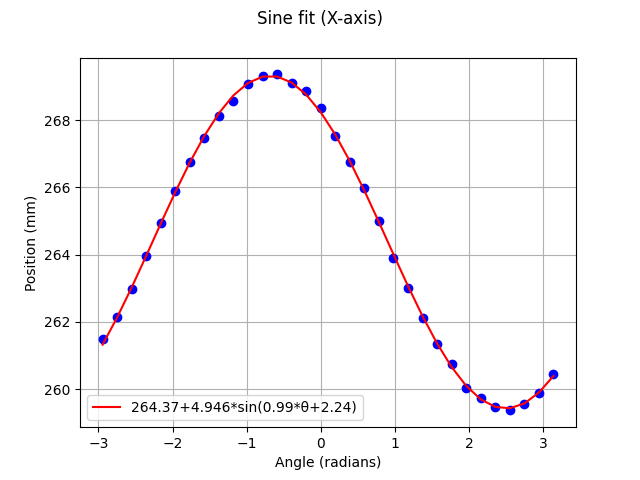
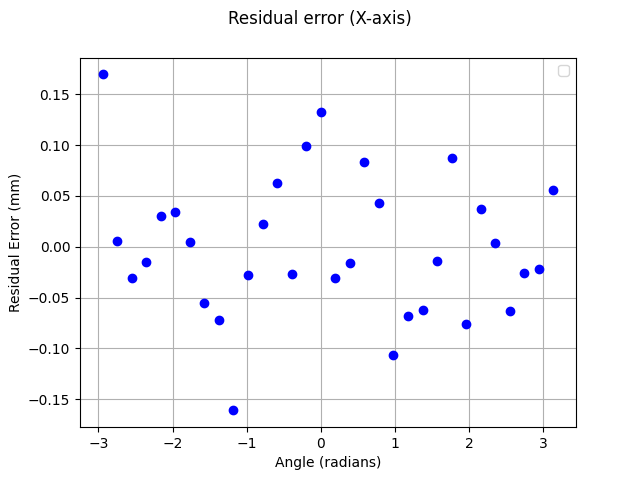
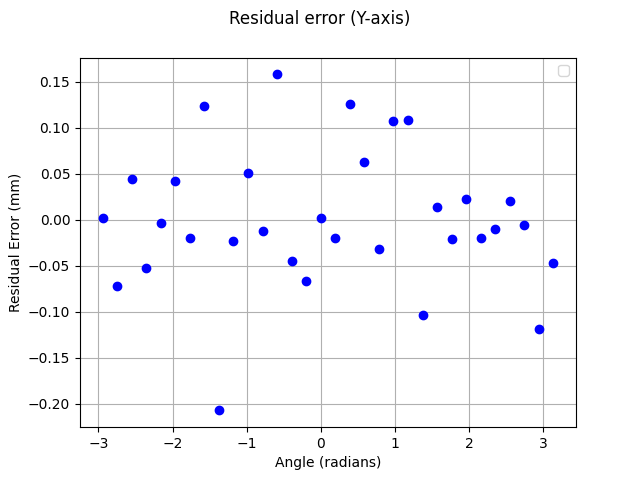
Center of Rotation¶
The center of rotation test measures the deviation of the SPECT panel from the center of rotation. I.e. it measures the deviation from an expected orbit. The test is based on the IAEA test 4.3.6, pg 174.
from pylinac.nuclear import CenterOfRotation
path = r"C:\path\to\image.dcm"
cor = CenterOfRotation(path)
cor.analyze()
results = cor.results_data()
print(results)
cor.plot() # plot the fitted sine x-values, residuals for x and y axis
This will produce a set of plots like so:
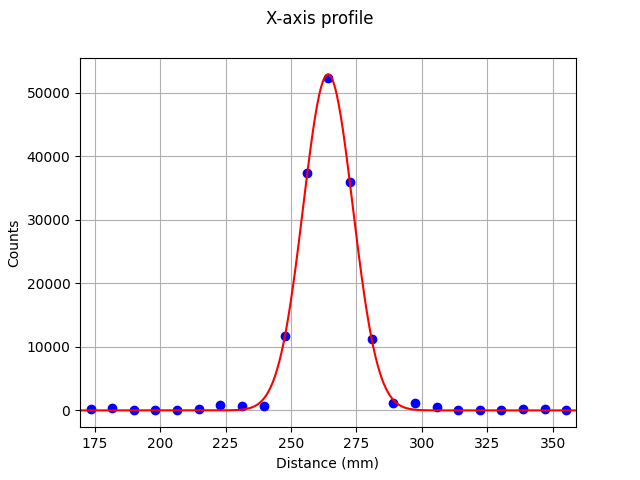
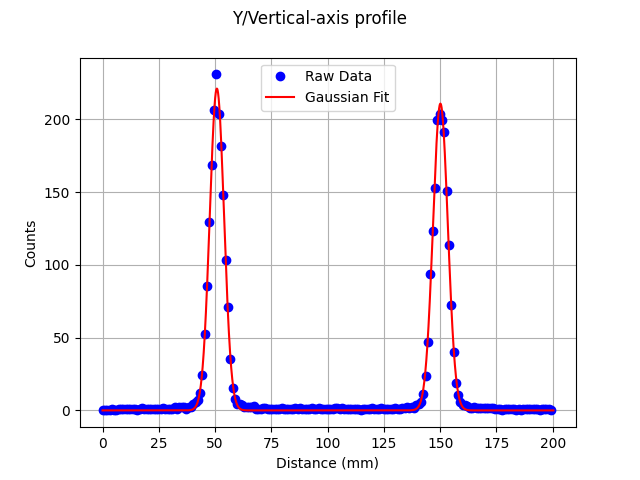
Tomographic Resolution¶
The tomographic resolution test measures the resolution of the SPECT system. The test is based on the IAEA test 4.3.4, pg 169.
from pylinac.nuclear import TomographicResolution
path = r"C:\path\to\image.dcm"
tr = TomographicResolution(path)
tr.analyze()
results = tr.results_data()
print(results)
tr.plot() # plot the 3 axis profiles and the fitted gaussians
This will produce 3 figures, one for each axis that look like so:
Algorithm¶
The weighted centroid of the entire 3D image stack of frames is calculated.
A 1D profile is created for each axis (x, y, z) at the location of the centroid.
A gaussian is fitted to each profile.
The FWHM and FWTM of each gaussian is calculated.
Note
The FWHM/FWTM is not empirical like it is in the rest of pylinac. It is calculated directly from the gaussian fit per the IAEA publication.
Simple Sensitivity¶
The simple sensitivity test measures the sensitivity of the SPECT system. The test is based on the IAEA test 2.3.8, pg 73. The equations are from the IAEA NMQC toolkit with minor modifications.
Warning
The IAEA NMQC toolkit appears to use the counts of the first frame of the background image only. In the test dataset, the background has 2 frames. Pylinac will use the mean background value of all frames. This will give very small differences in the results if there are multiple frames in the background image.
No background¶
from pylinac.nuclear import SimpleSensitivity, Nuclide
phantom_path = r"C:\path\to\image.dcm"
ss = SimpleSensitivity(path)
ss.analyze(activity_mbq=10, nuclide=Nuclide.Tc99m)
results = ss.results_data()
print(results)
With background¶
from pylinac.nuclear import SimpleSensitivity, Nuclide
phantom_path = r"C:\path\to\image.dcm"
background_path = r"C:\path\to\background.dcm"
ss = SimpleSensitivity(path, background_path=background_path)
ss.analyze(activity_mbq=10, nuclide=Nuclide.Tc99m)
results = ss.results_data()
print(results)
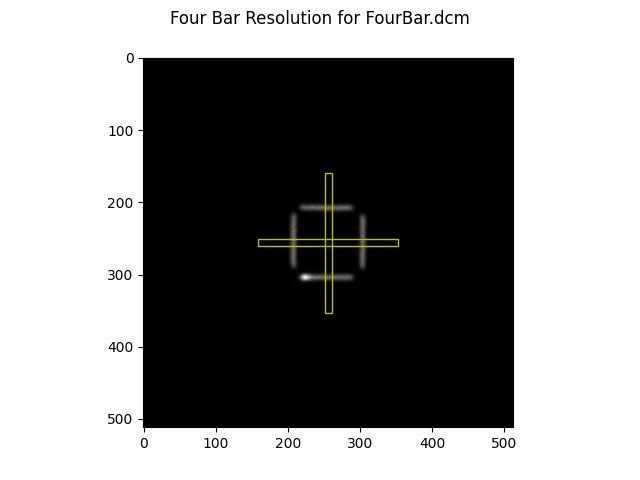
Four-Bar Spatial Resolution¶
The four-bar spatial resolution test measures the spatial resolution of the SPECT system. The test is based on the IAEA test 2.3.8, Method 2, pg 75 and on the NMQC toolkit manual 4.5.3.
from pylinac.nuclear import FourBarResolution
path = r"C:\path\to\image.dcm"
fbr = FourBarResolution(path)
fbr.analyze(separation_mm=100, roi_width_mm=10)
results = fbr.results_data()
print(results)
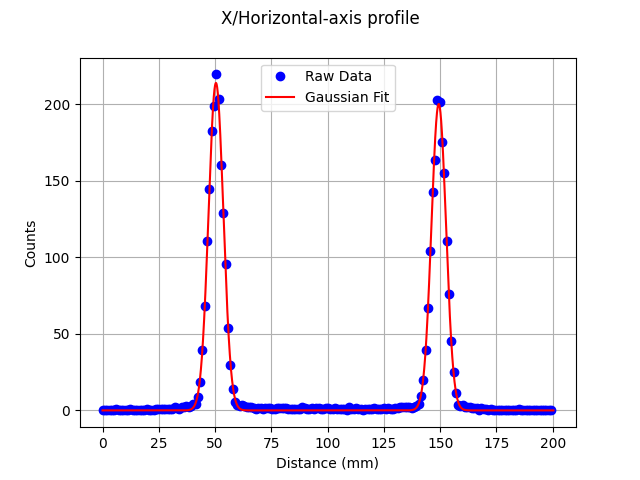
fbr.plot() # plot the image and 2 axis profiles with fitted gaussians
This will produce a set of plots like so:
Algorithm¶
Warning
The 4 lines are assumed to be centered about the image center.
Note
The image is assumed to only have 1 frame. If there are multiple frames, only the first frame will be used.
2 Rectangular ROIs are sampled. The ROIs are centered at the image center. The longest dimention of the ROI is twice the passed
separation_mm. The shortest dimension is theroi_width_mmparameter.The mean of the profile along the axis of interest is calculated. E.g. for a 100px x 5px this will take a mean across the 5px to give a 100px x 1px profile.
For each axis profile, an initial simple peak search is done to create initial guesses for the gaussian fits.
Each profile is fitted to two gaussian peaks using the initial guesses from the peak search.
The FWHM and FWTM of each gaussian is calculated.
Pixel size (mm/px) is determined by:
\[\frac{Stated Separation}{|G2_{peak} - G1_{peak}|}\]where \(Stated Separation\) is the
separation_mmparameter, \(G1_{peak}\) is the peak position of the first gaussian fit, and \(G2_{peak}\) is the peak position of the second gaussian fit, both in pixels.
Four-Quadrant Spatial Resolution¶
The four-quadrant spatial resolution test measures the spatial resolution of the SPECT system. The test is based on the IAEA test 2.3.8, Method 2, pg 75 and the NMQC toolkit section 4.5.5.
from pylinac.nuclear import QuadrantResolution
path = r"C:\path\to\image.dcm"
qr = QuadrantResolution(path)
qr.analyze(
bar_widths=(4.23, 3.18, 2.54, 2.12), roi_diameter_mm=70, distance_from_center_mm=130
)
results = qr.results_data()
print(results)
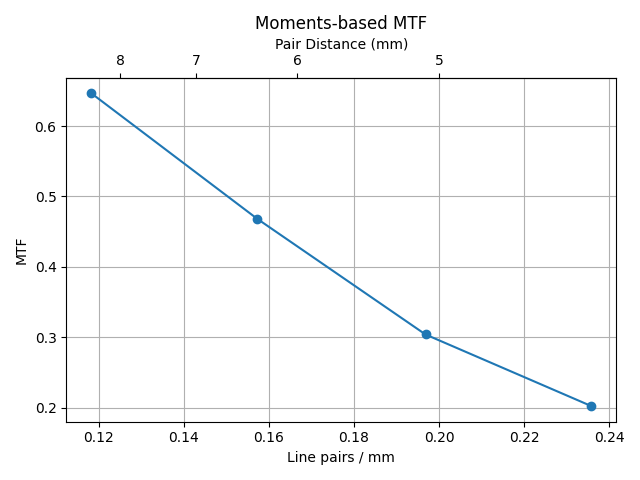
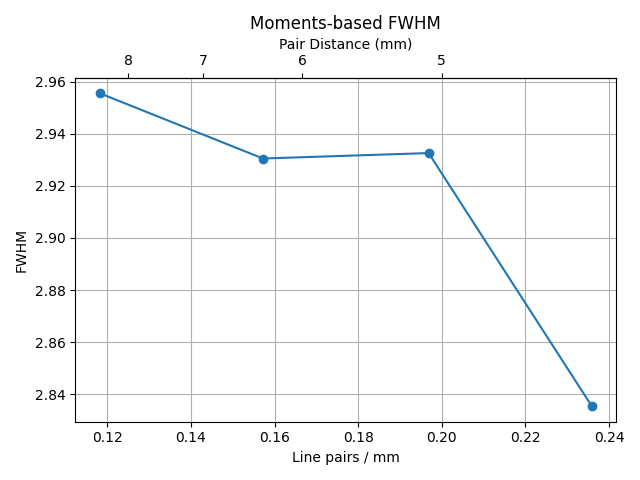
qr.plot() # plot the image with quadrant ROIs, the MTF, and the FWHMs.
This will produce a set of plots like so:
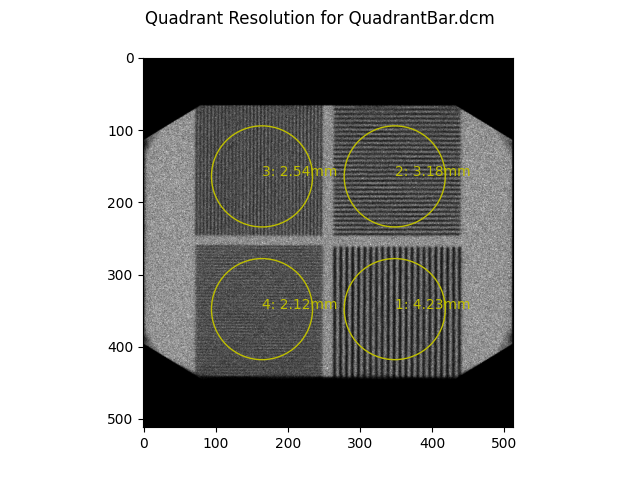
Algorithm¶
Warning
The line pair quadrants are assumed to be equidistant from the image center.
4 circular ROIs are sampled. The ROIs are offset from the image center by
distance_from_center_mm. The diameter of the ROI is theroi_diameter_mmparameter. The ROIs start at -45 and go CCW to match the NMQC toolkit.The mean and standard deviation of each ROI is calculated.
For each ROI, the MTF and FWHM are calculated from Equation 8 and A8 of Hander et al [5]:
(1)¶\[MTF = \frac{\sqrt{2 * (\sigma^{2} - \mu)}}{\mu}\](2)¶\[FWHM = 1.058 \times width \times \sqrt{\ln\left(\frac{\mu}{\sqrt{2 \times (\sigma^{2} - \mu)}}\right)}\]where \(\mu\) is the mean pixel value of the ROI and \(\sigma\) is the standard deviation of the ROI pixel values.
Tomographic Uniformity¶
The tomographic uniformity test measures the uniformity of the SPECT system. The test is based on the IAEA test 4.3.3, pg 165. It is very similar to the Planar Uniformity test.
from pylinac.nuclear import TomographicUniformity
path = r"C:\path\to\image.dcm"
tu = TomographicUniformity(path)
tu.analyze(
ufov_ratio=0.95,
cfov_ratio=0.75,
center_ratio=0.4,
window_size=5,
threshold=0.75,
window_size=5,
)
results = tu.results_data()
print(results)
tu.plot() # plot the uniformity image, the UFOV, CFOV, and Center ROI, and the sliding windows that resulted in the maximum differential uniformity.
This will result in a plot like so:
Algorithm¶
Note
Compared to the NMQC toolkit, the UFOV, CFOV, and Center ROI are based on ratios of the phantom size and are not absolute. E.g. in the NMQC manual the UFOV is the phantom radius - 2cm and the center ROI is a 6cm circle. These absolute values are not used in pylinac. Instead, ratios are used as are done in the Planar Uniformity test. To get the same results as the NMQC toolkit, basic math from the known phantom size can be used. Further, the default ratios are close to the NMQC toolkit values for the Jaszczak phantom.
The 3D array is sliced to the frames passed by the user.
The mean of the frames of interest are taken along the z-axis (in/out of viewing plane) to create a single 2D image.
From here, the algorithm is the same as the Planar Uniformity test.
In addition to the UFOV and CFOV, a “center” FOV is also sampled based on the
center_ratio.The integral and differential uniformity are calculated for the UFOV, CFOV, and Center ROI.
The center-to-edge ratio is calculated by dividing the mean of the center ROI by the mean value of the pixels between the UFOV and CFOV.
Tomographic Contrast¶
The tomographic contrast test measures the contrast of the SPECT system. The test is based on the IAEA test 4.3.9, pg 182.
from pylinac.nuclear import TomographicContrast
path = r"C:\path\to\image.dcm"
tc = TomographicContrast(path)
tc.analyze(
sphere_diameters_mm=(38, 31.8, ...),
sphere_angles=(-10, -70, ...),
ufov_ratio=0.95,
search_window_px=5,
search_slices=3,
)
results = tc.results_data()
print(results)
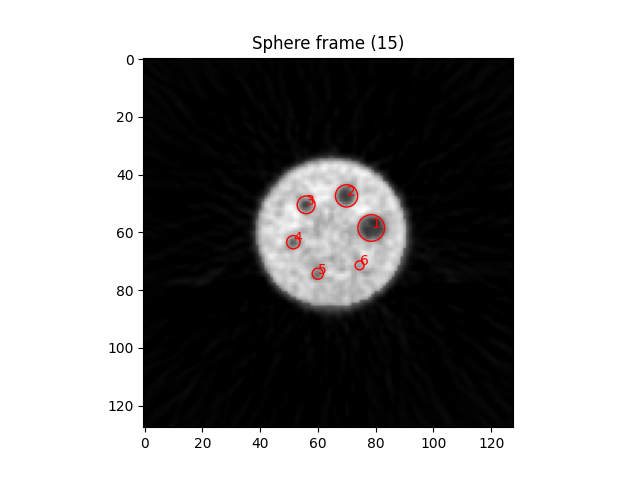
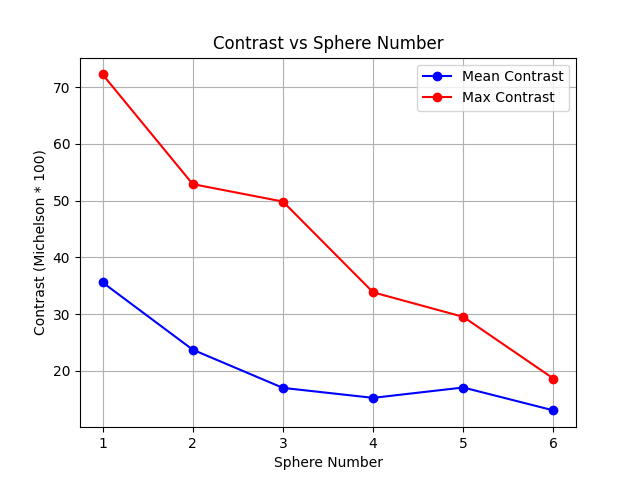
tc.plot() # plot the image with the ROIs and the contrast values.
This will result in a set of plots like so:
Algorithm¶
Note
Pylinac will automatically identify the uniformity slice and the “sphere” slice. There is no manual option.
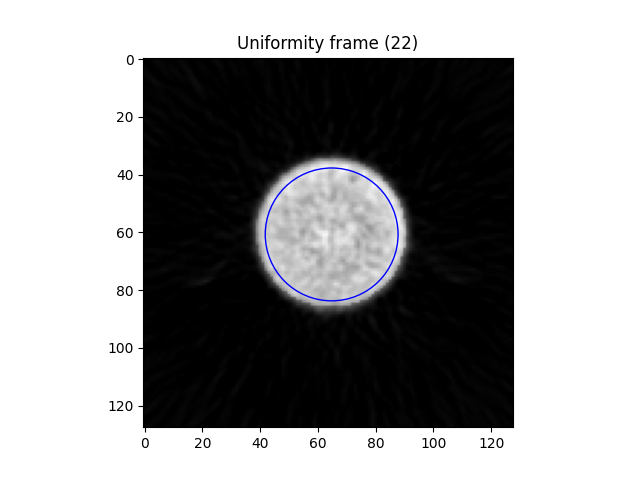
Uniformity Frame¶
The uniformity frame is found by iterating over each frame:
The frame is thresholded to 10% of the global max pixel value.
The largest remaining ROI is selected.
The ROI is eroded by the
ufov_ratioparameter (this is similar to what is done for the Planar Uniformity test).The uniformity is evaluated for this ROI as well as the ROI diameter, center point, and mean pixel value.
Any frame with an ROI size less than the median - std of all ROI sizes is rejected; this mostly means edge frames are rejected.
The frame with the lowest uniformity is selected as the uniformity frame.
Sphere Frame¶
The initial sphere frame is selected by finding the frame with the highest uniformity (i.e. non-uniformity). This will usually find the slice at or near the spheres as the cold sphere will create non-uniformity.
From this initial sphere frame, each ROI is found by:
Starting at the position indicated by the
sphere_anglesandsphere_diameters_mmparameters, a minimization is performed to find the best x,y,z coordinates that maximizes the contrast. The search is bounded from the initial position to thesearch_window_pxandsearch_slicesparameters.Note
The search is in 3D space. However, for ease of plotting, all the sphere ROIs will be shown on one plot when running
.plot(). The slice shown will be the most common slice the final sphere locations are determined upon.
References¶
API¶
- class pylinac.nuclear.MaxCountRate(path: str | Path)[source]¶
Bases:
ResultsDataMixin[MaxCountRateResults],QuaacMixinCalculate the maximum countrate of a gamma camera.
Reimplementation of the NMQC toolkit’s MaxCountRate test (4.2)
Parameters¶
- pathstr | Path
The path to the DICOM file.
See Also¶
- analyze(frame_duration: float = 1.0) float[source]¶
Analyze the DICOM file and return the maximum countrate.
Parameters¶
- frame_durationfloat
The duration of each frame in seconds.
- property max_countrate: float¶
The maximum countrate in counts/second.
- property max_frame: int¶
The frame number that had the maximum countrate.
- property max_time: float¶
The time of the maximum countrate.
- clear_captured_warnings() None¶
Clear the list of captured warnings.
- get_captured_warnings() list[dict]¶
Retrieve the list of captured warnings, deduplicated.
- results_data(as_dict: bool = False, as_json: bool = False, by_alias: bool = False, exclude: set[str] | None = None) T | dict | str¶
Present the results data and metadata as a dataclass, dict, or tuple. The default return type is a dataclass.
Parameters¶
- as_dictbool
If True, return the results as a dictionary.
- as_jsonbool
If True, return the results as a JSON string. Cannot be True if as_dict is True.
- by_aliasbool
If True, use the alias names of the dataclass fields. These are generally the more human-readable names.
- excludeset
A set of fields to exclude from the results data.
- to_quaac(path: str | Path, performer: User, primary_equipment: Equipment, format: Literal['json', 'yaml'] = 'yaml', attachments: list[Attachment] | None = None, overwrite: bool = False, **kwargs) None¶
Write an analysis to a QuAAC file. This will include the items from results_data() and the PDF report.
Parameters¶
- pathstr, Path
The file to write the results to.
- performerUser
The user who performed the analysis.
- primary_equipmentEquipment
The equipment used in the analysis.
- format{‘json’, ‘yaml’}
The format to write the file in.
- attachmentslist of Attachment
Additional attachments to include in the QuAAC file.
- overwritebool
Whether to overwrite the file if it already exists.
- kwargs
Additional keyword arguments to pass to the Document instantiation.
- pydantic model pylinac.nuclear.MaxCountRateResults[source]¶
Bases:
ResultBaseCreate a new model by parsing and validating input data from keyword arguments.
Raises [ValidationError][pydantic_core.ValidationError] if the input data cannot be validated to form a valid model.
self is explicitly positional-only to allow self as a field name.
- field max_countrate: float [Required]¶
- field max_frame: int [Required]¶
- field frame_duration: float [Required]¶
- field sums: dict[int, float] [Required]¶
- class pylinac.nuclear.PlanarUniformity(path: str | Path)[source]¶
Bases:
QuaacMixinAnalyzes an image for its integral and differential uniformity.
- analyze(ufov_ratio: float = 0.95, cfov_ratio: float = 0.75, window_size: int = 5, threshold: float = 0.75) None[source]¶
Analyze the field for the UFOV and CFOV’s integral and differential uniformity.
Parameters¶
- ufov_ratiofloat
The ratio of the useful field of view (UFOV) to the detected size of the field of view.
- cfov_ratiofloat
The ratio of the central field of view (CFOV) to the UFOV. E.g. if this is 0.75 and the UFOV ratio is 0.95, then the CFOV will be 0.95*0.75=0.7125 of the total FOV.
- window_sizeint
The size of the window in pixels to use for the differential uniformity calculation.
- thresholdfloat
The threshold to use for removing low-value pixels. This is a fraction of the mean value of the pixels that are > 0.
- pydantic model pylinac.nuclear.PlanarUniformityResults[source]¶
Bases:
BaseModelCreate a new model by parsing and validating input data from keyword arguments.
Raises [ValidationError][pydantic_core.ValidationError] if the input data cannot be validated to form a valid model.
self is explicitly positional-only to allow self as a field name.
- field ufov_integral_uniformity: float [Required]¶
- field ufov_differential_uniformity: float [Required]¶
- field cfov_integral_uniformity: float [Required]¶
- field cfov_differential_uniformity: float [Required]¶
- class pylinac.nuclear.CenterOfRotation(path: str | Path)[source]¶
Bases:
ResultsDataMixin[CenterOfRotationResults],QuaacMixinAnalyze the center of rotation deviation of a gamma camera.
- analyze() None[source]¶
Analyze the DICOM file to determine the deviation from the center of rotation.
- property x_cor_deviation_mm: float¶
The deviation of the center of rotation from the center of the matrix in mm.
- property y_cor_deviation_mm: float¶
The deviation of the center of rotation from the center of the matrix in mm.
- clear_captured_warnings() None¶
Clear the list of captured warnings.
- get_captured_warnings() list[dict]¶
Retrieve the list of captured warnings, deduplicated.
- results_data(as_dict: bool = False, as_json: bool = False, by_alias: bool = False, exclude: set[str] | None = None) T | dict | str¶
Present the results data and metadata as a dataclass, dict, or tuple. The default return type is a dataclass.
Parameters¶
- as_dictbool
If True, return the results as a dictionary.
- as_jsonbool
If True, return the results as a JSON string. Cannot be True if as_dict is True.
- by_aliasbool
If True, use the alias names of the dataclass fields. These are generally the more human-readable names.
- excludeset
A set of fields to exclude from the results data.
- to_quaac(path: str | Path, performer: User, primary_equipment: Equipment, format: Literal['json', 'yaml'] = 'yaml', attachments: list[Attachment] | None = None, overwrite: bool = False, **kwargs) None¶
Write an analysis to a QuAAC file. This will include the items from results_data() and the PDF report.
Parameters¶
- pathstr, Path
The file to write the results to.
- performerUser
The user who performed the analysis.
- primary_equipmentEquipment
The equipment used in the analysis.
- format{‘json’, ‘yaml’}
The format to write the file in.
- attachmentslist of Attachment
Additional attachments to include in the QuAAC file.
- overwritebool
Whether to overwrite the file if it already exists.
- kwargs
Additional keyword arguments to pass to the Document instantiation.
- pydantic model pylinac.nuclear.CenterOfRotationResults[source]¶
Bases:
ResultBaseCreate a new model by parsing and validating input data from keyword arguments.
Raises [ValidationError][pydantic_core.ValidationError] if the input data cannot be validated to form a valid model.
self is explicitly positional-only to allow self as a field name.
- field x_deviation_mm: float [Required]¶
- field y_deviation_mm: float [Required]¶
- class pylinac.nuclear.TomographicResolution(path: str | Path)[source]¶
Bases:
ResultsDataMixin[TomographicResolutionResults],QuaacMixinAnalyze a tomographic resolution image for its x/y/z resolution. Based on IAEA test 4.3.4, pg 169
Parameters¶
- pathstr | Path
The path to the DICOM file.
- analyze() None[source]¶
Analyze the frames by finding the 3D weighted centroid and then taking a profile of the x/y/z axes and that position
- clear_captured_warnings() None¶
Clear the list of captured warnings.
- get_captured_warnings() list[dict]¶
Retrieve the list of captured warnings, deduplicated.
- results_data(as_dict: bool = False, as_json: bool = False, by_alias: bool = False, exclude: set[str] | None = None) T | dict | str¶
Present the results data and metadata as a dataclass, dict, or tuple. The default return type is a dataclass.
Parameters¶
- as_dictbool
If True, return the results as a dictionary.
- as_jsonbool
If True, return the results as a JSON string. Cannot be True if as_dict is True.
- by_aliasbool
If True, use the alias names of the dataclass fields. These are generally the more human-readable names.
- excludeset
A set of fields to exclude from the results data.
- to_quaac(path: str | Path, performer: User, primary_equipment: Equipment, format: Literal['json', 'yaml'] = 'yaml', attachments: list[Attachment] | None = None, overwrite: bool = False, **kwargs) None¶
Write an analysis to a QuAAC file. This will include the items from results_data() and the PDF report.
Parameters¶
- pathstr, Path
The file to write the results to.
- performerUser
The user who performed the analysis.
- primary_equipmentEquipment
The equipment used in the analysis.
- format{‘json’, ‘yaml’}
The format to write the file in.
- attachmentslist of Attachment
Additional attachments to include in the QuAAC file.
- overwritebool
Whether to overwrite the file if it already exists.
- kwargs
Additional keyword arguments to pass to the Document instantiation.
- pydantic model pylinac.nuclear.TomographicResolutionResults[source]¶
Bases:
ResultBaseCreate a new model by parsing and validating input data from keyword arguments.
Raises [ValidationError][pydantic_core.ValidationError] if the input data cannot be validated to form a valid model.
self is explicitly positional-only to allow self as a field name.
- field x_fwhm: float [Required]¶
- field y_fwhm: float [Required]¶
- field z_fwhm: float [Required]¶
- field x_fwtm: float [Required]¶
- field y_fwtm: float [Required]¶
- field z_fwtm: float [Required]¶
- class pylinac.nuclear.SimpleSensitivity(phantom_path: str | Path, background_path: str | Path | None = None)[source]¶
Bases:
ResultsDataMixin[SimpleSensitivityResults],QuaacMixinThe ‘simple’ sensitivity test as defined by IAEA 2.3.9. Equations come from the IAEA NMQC toolkit.
- property phantom_cps: float¶
The counts per second of the phantom.
- property duration_s: float¶
The duration of the phantom image.
- property background_cps: float¶
The counts per second of the background.
- property decay_correction: float¶
The decay correction factor.
- property sensitivity_mbq: float¶
The sensitivity in MBq.
- property sensitivity_uci: float¶
The sensitivity in uCi.
- clear_captured_warnings() None¶
Clear the list of captured warnings.
- get_captured_warnings() list[dict]¶
Retrieve the list of captured warnings, deduplicated.
- results_data(as_dict: bool = False, as_json: bool = False, by_alias: bool = False, exclude: set[str] | None = None) T | dict | str¶
Present the results data and metadata as a dataclass, dict, or tuple. The default return type is a dataclass.
Parameters¶
- as_dictbool
If True, return the results as a dictionary.
- as_jsonbool
If True, return the results as a JSON string. Cannot be True if as_dict is True.
- by_aliasbool
If True, use the alias names of the dataclass fields. These are generally the more human-readable names.
- excludeset
A set of fields to exclude from the results data.
- to_quaac(path: str | Path, performer: User, primary_equipment: Equipment, format: Literal['json', 'yaml'] = 'yaml', attachments: list[Attachment] | None = None, overwrite: bool = False, **kwargs) None¶
Write an analysis to a QuAAC file. This will include the items from results_data() and the PDF report.
Parameters¶
- pathstr, Path
The file to write the results to.
- performerUser
The user who performed the analysis.
- primary_equipmentEquipment
The equipment used in the analysis.
- format{‘json’, ‘yaml’}
The format to write the file in.
- attachmentslist of Attachment
Additional attachments to include in the QuAAC file.
- overwritebool
Whether to overwrite the file if it already exists.
- kwargs
Additional keyword arguments to pass to the Document instantiation.
- pydantic model pylinac.nuclear.SimpleSensitivityResults[source]¶
Bases:
ResultBaseCreate a new model by parsing and validating input data from keyword arguments.
Raises [ValidationError][pydantic_core.ValidationError] if the input data cannot be validated to form a valid model.
self is explicitly positional-only to allow self as a field name.
- field phantom_cps: float [Required]¶
- field background_cps: float [Required]¶
- field half_life_s: float [Required]¶
- field duration_s: float [Required]¶
- field decay_correction: float [Required]¶
- field sensitivity_mbq: float [Required]¶
- field sensitivity_uci: float [Required]¶
- class pylinac.nuclear.FourBarResolution(path: str | Path)[source]¶
Bases:
ResultsDataMixin[FourBarResolutionResults],QuaacMixinSpatial resolution in the X and Y direction as measured by a ‘four-bar’ phantom.
Parameters¶
- pathstr | Path
The path to the DICOM file.
- analyze(separation_mm: float = 100, roi_width_mm: float = 10) None[source]¶
Take a vertical and horizontal profile about the center of the image.
Fit two gaussians to find the two peaks in each direction.
Parameters¶
- separation_mmfloat
The distance between the two peaks in mm. The length of the ROI to sample will be 2x the separation perpendicular to the sample lines.
- roi_width_mmfloat
The width of the ROI. This is the width in the direction of the sample lines.
- plot(show: bool = True)[source]¶
Plot the image with the sample ROIs and the x/y profiles with gaussian fits
- clear_captured_warnings() None¶
Clear the list of captured warnings.
- get_captured_warnings() list[dict]¶
Retrieve the list of captured warnings, deduplicated.
- results_data(as_dict: bool = False, as_json: bool = False, by_alias: bool = False, exclude: set[str] | None = None) T | dict | str¶
Present the results data and metadata as a dataclass, dict, or tuple. The default return type is a dataclass.
Parameters¶
- as_dictbool
If True, return the results as a dictionary.
- as_jsonbool
If True, return the results as a JSON string. Cannot be True if as_dict is True.
- by_aliasbool
If True, use the alias names of the dataclass fields. These are generally the more human-readable names.
- excludeset
A set of fields to exclude from the results data.
- to_quaac(path: str | Path, performer: User, primary_equipment: Equipment, format: Literal['json', 'yaml'] = 'yaml', attachments: list[Attachment] | None = None, overwrite: bool = False, **kwargs) None¶
Write an analysis to a QuAAC file. This will include the items from results_data() and the PDF report.
Parameters¶
- pathstr, Path
The file to write the results to.
- performerUser
The user who performed the analysis.
- primary_equipmentEquipment
The equipment used in the analysis.
- format{‘json’, ‘yaml’}
The format to write the file in.
- attachmentslist of Attachment
Additional attachments to include in the QuAAC file.
- overwritebool
Whether to overwrite the file if it already exists.
- kwargs
Additional keyword arguments to pass to the Document instantiation.
- pydantic model pylinac.nuclear.FourBarResolutionResults[source]¶
Bases:
ResultBaseCreate a new model by parsing and validating input data from keyword arguments.
Raises [ValidationError][pydantic_core.ValidationError] if the input data cannot be validated to form a valid model.
self is explicitly positional-only to allow self as a field name.
- field x_fwhm: float [Required]¶
- field y_fwhm: float [Required]¶
- field x_fwtm: float [Required]¶
- field y_fwtm: float [Required]¶
- field x_measured_pixel_size: float [Required]¶
- field y_measured_pixel_size: float [Required]¶
- field x_pixel_size_difference: float [Required]¶
- field y_pixel_size_difference: float [Required]¶
- class pylinac.nuclear.QuadrantResolution(path: str | Path)[source]¶
Bases:
ResultsDataMixin[QuadrantResolutionResults],QuaacMixinAnalyze a 4-quadrant image of high-contrast line pairs to determine MTF and FWHM.
Parameters¶
- pathstr | Path
The path to the DICOM file.
- analyze(bar_widths: Sequence[float], roi_diameter_mm: float = 70, distance_from_center_mm: float = 130) None[source]¶
Analyze the image to determine the MTF resolution and FWHMs.
Parameters¶
- bar_widthslist
The bar widths in mm. A line pair will be 2x this value.
- roi_diameter_mmfloat
The diameter of the ROI in mm.
- distance_from_center_mmfloat
The distance from the center of the image to the center of the ROI in mm.
- clear_captured_warnings() None¶
Clear the list of captured warnings.
- get_captured_warnings() list[dict]¶
Retrieve the list of captured warnings, deduplicated.
- results_data(as_dict: bool = False, as_json: bool = False, by_alias: bool = False, exclude: set[str] | None = None) T | dict | str¶
Present the results data and metadata as a dataclass, dict, or tuple. The default return type is a dataclass.
Parameters¶
- as_dictbool
If True, return the results as a dictionary.
- as_jsonbool
If True, return the results as a JSON string. Cannot be True if as_dict is True.
- by_aliasbool
If True, use the alias names of the dataclass fields. These are generally the more human-readable names.
- excludeset
A set of fields to exclude from the results data.
- to_quaac(path: str | Path, performer: User, primary_equipment: Equipment, format: Literal['json', 'yaml'] = 'yaml', attachments: list[Attachment] | None = None, overwrite: bool = False, **kwargs) None¶
Write an analysis to a QuAAC file. This will include the items from results_data() and the PDF report.
Parameters¶
- pathstr, Path
The file to write the results to.
- performerUser
The user who performed the analysis.
- primary_equipmentEquipment
The equipment used in the analysis.
- format{‘json’, ‘yaml’}
The format to write the file in.
- attachmentslist of Attachment
Additional attachments to include in the QuAAC file.
- overwritebool
Whether to overwrite the file if it already exists.
- kwargs
Additional keyword arguments to pass to the Document instantiation.
- pydantic model pylinac.nuclear.QuadrantResolutionResults[source]¶
Bases:
ResultBaseCreate a new model by parsing and validating input data from keyword arguments.
Raises [ValidationError][pydantic_core.ValidationError] if the input data cannot be validated to form a valid model.
self is explicitly positional-only to allow self as a field name.
- field quadrants: dict[str, dict[str, float]] [Required]¶
quadrant idx: {‘mtf’: mtf, ‘fwhm’: fwhm, ‘lpmm’: lpmm}
- class pylinac.nuclear.TomographicUniformity(*args, **kwargs)[source]¶
Bases:
ResultsDataMixin[TomographicUniformityResults],PlanarUniformityEvaluation of the tomographic uniformity of a SPECT image. Typically, a Jaszczak phantom or similar. This is similar to the Planar Uniformity test.
- property frame_result: dict¶
We always have a single result
- property frame_key: str¶
The key for the single frame result
- center_border_ratio(center_ratio: float, window_size: int) float[source]¶
The center-to-border ratio as defined by the NMQC toolkit.
The center ROI is a 6cm diameter circle in the center of the phantom. The border ROI is the subtraction of the CFOV from the UFOV.
- analyze(first_frame: int = 0, last_frame: int = -1, ufov_ratio: float = 0.8, cfov_ratio: float = 0.75, center_ratio: float = 0.4, threshold: float = 0.75, window_size: int = 5) None[source]¶
Analyze the image to determine the uniformity. This will take a mean of pixel values for frames between the first and last stated frame.
Parameters¶
- first_frameint
The index of the first frame to analyze.
- last_frameint
The index of the last frame to analyze.
- ufov_ratiofloat
The ratio of the UFOV to the phantom.
- cfov_ratiofloat
The ratio of the central FOV to the UFOV.
- center_ratiofloat
The ratio of the center ROI to the phantom.
- thresholdfloat
The threshold to use for the image.
- clear_captured_warnings() None¶
Clear the list of captured warnings.
- get_captured_warnings() list[dict]¶
Retrieve the list of captured warnings, deduplicated.
- results_data(as_dict: bool = False, as_json: bool = False, by_alias: bool = False, exclude: set[str] | None = None) T | dict | str¶
Present the results data and metadata as a dataclass, dict, or tuple. The default return type is a dataclass.
Parameters¶
- as_dictbool
If True, return the results as a dictionary.
- as_jsonbool
If True, return the results as a JSON string. Cannot be True if as_dict is True.
- by_aliasbool
If True, use the alias names of the dataclass fields. These are generally the more human-readable names.
- excludeset
A set of fields to exclude from the results data.
- to_quaac(path: str | Path, performer: User, primary_equipment: Equipment, format: Literal['json', 'yaml'] = 'yaml', attachments: list[Attachment] | None = None, overwrite: bool = False, **kwargs) None¶
Write an analysis to a QuAAC file. This will include the items from results_data() and the PDF report.
Parameters¶
- pathstr, Path
The file to write the results to.
- performerUser
The user who performed the analysis.
- primary_equipmentEquipment
The equipment used in the analysis.
- format{‘json’, ‘yaml’}
The format to write the file in.
- attachmentslist of Attachment
Additional attachments to include in the QuAAC file.
- overwritebool
Whether to overwrite the file if it already exists.
- kwargs
Additional keyword arguments to pass to the Document instantiation.
- pydantic model pylinac.nuclear.TomographicUniformityResults[source]¶
Bases:
ResultBaseCreate a new model by parsing and validating input data from keyword arguments.
Raises [ValidationError][pydantic_core.ValidationError] if the input data cannot be validated to form a valid model.
self is explicitly positional-only to allow self as a field name.
- field cfov_integral_uniformity: float [Required]¶
- field cfov_differential_uniformity: float [Required]¶
- field ufov_integral_uniformity: float [Required]¶
- field ufov_differential_uniformity: float [Required]¶
- field center_border_ratio: float [Required]¶
- field first_frame: int [Required]¶
- field last_frame: int [Required]¶
- class pylinac.nuclear.TomographicContrast(path: str | Path)[source]¶
Bases:
ResultsDataMixin[TomographicContrastResults],QuaacMixin- property uniformity_frame: str¶
The frame with the most uniformity.
- analyze(sphere_diameters_mm: Sequence[float] = (38, 31.8, 25.4, 19.1, 15.9, 12.7), sphere_angles: Sequence[float] = (-10, -70, -130, -190, 110, 50), ufov_ratio: float = 0.8, search_window_px: int = 5, search_slices: int = 3) None[source]¶
Analyze the image to determine the contrast.
Parameters¶
- sphere_diameters_mmlist
The diameters of the spheres in mm.
- sphere_angleslist
The angles of the spheres in degrees.
- plot(show: bool = True)[source]¶
Plot the uniformity frame, sphere ROI frame, and contrast vs sphere number.
- clear_captured_warnings() None¶
Clear the list of captured warnings.
- get_captured_warnings() list[dict]¶
Retrieve the list of captured warnings, deduplicated.
- results_data(as_dict: bool = False, as_json: bool = False, by_alias: bool = False, exclude: set[str] | None = None) T | dict | str¶
Present the results data and metadata as a dataclass, dict, or tuple. The default return type is a dataclass.
Parameters¶
- as_dictbool
If True, return the results as a dictionary.
- as_jsonbool
If True, return the results as a JSON string. Cannot be True if as_dict is True.
- by_aliasbool
If True, use the alias names of the dataclass fields. These are generally the more human-readable names.
- excludeset
A set of fields to exclude from the results data.
- to_quaac(path: str | Path, performer: User, primary_equipment: Equipment, format: Literal['json', 'yaml'] = 'yaml', attachments: list[Attachment] | None = None, overwrite: bool = False, **kwargs) None¶
Write an analysis to a QuAAC file. This will include the items from results_data() and the PDF report.
Parameters¶
- pathstr, Path
The file to write the results to.
- performerUser
The user who performed the analysis.
- primary_equipmentEquipment
The equipment used in the analysis.
- format{‘json’, ‘yaml’}
The format to write the file in.
- attachmentslist of Attachment
Additional attachments to include in the QuAAC file.
- overwritebool
Whether to overwrite the file if it already exists.
- kwargs
Additional keyword arguments to pass to the Document instantiation.
- pydantic model pylinac.nuclear.TomographicContrastResults[source]¶
Bases:
ResultBaseCreate a new model by parsing and validating input data from keyword arguments.
Raises [ValidationError][pydantic_core.ValidationError] if the input data cannot be validated to form a valid model.
self is explicitly positional-only to allow self as a field name.
- field uniformity_baseline: float [Required]¶
- field spheres: dict[str, TomgraphicSphere] [Required]¶